近日,北京师范大学系统科学学院斯白露教授团队在IEEE旗下国际期刊《IEEE Transactions on Cognitive and Developmental Systems》(JCR一区,影响因子5.0)上发表题为《An Improved Artificial Potential Field Method with Distributed Representation and Scale-Invariant Path Planning》的研究论文。该成果由北京师范大学、中国科学院沈阳自动化研究所与北航等多单位合作完成。论文由中国科学院沈阳自动化研究所宋非博士为第一作者,北京师范大学邵宇秀助理研究员与斯白露教授为共同通讯作者。
本研究聚焦于自动导航系统中的路径规划核心问题。传统的人工势场(Artificial Potential Field, APF)算法因其简单高效而广泛应用于无人驾驶、机器人路径规划等领域。然而,该方法在复杂环境下存在目标不可达、局部最小点陷阱等问题(如图1所示)。为此,研究团队提出了一种神经科学启发的改进算法——神经感受野法(Neuro-Receptive Field, NRF),通过引入类脑的分布式编码机制(如图2所示),在力场建模中引入神经感受野的概念,重构吸引与排斥力的计算模型。
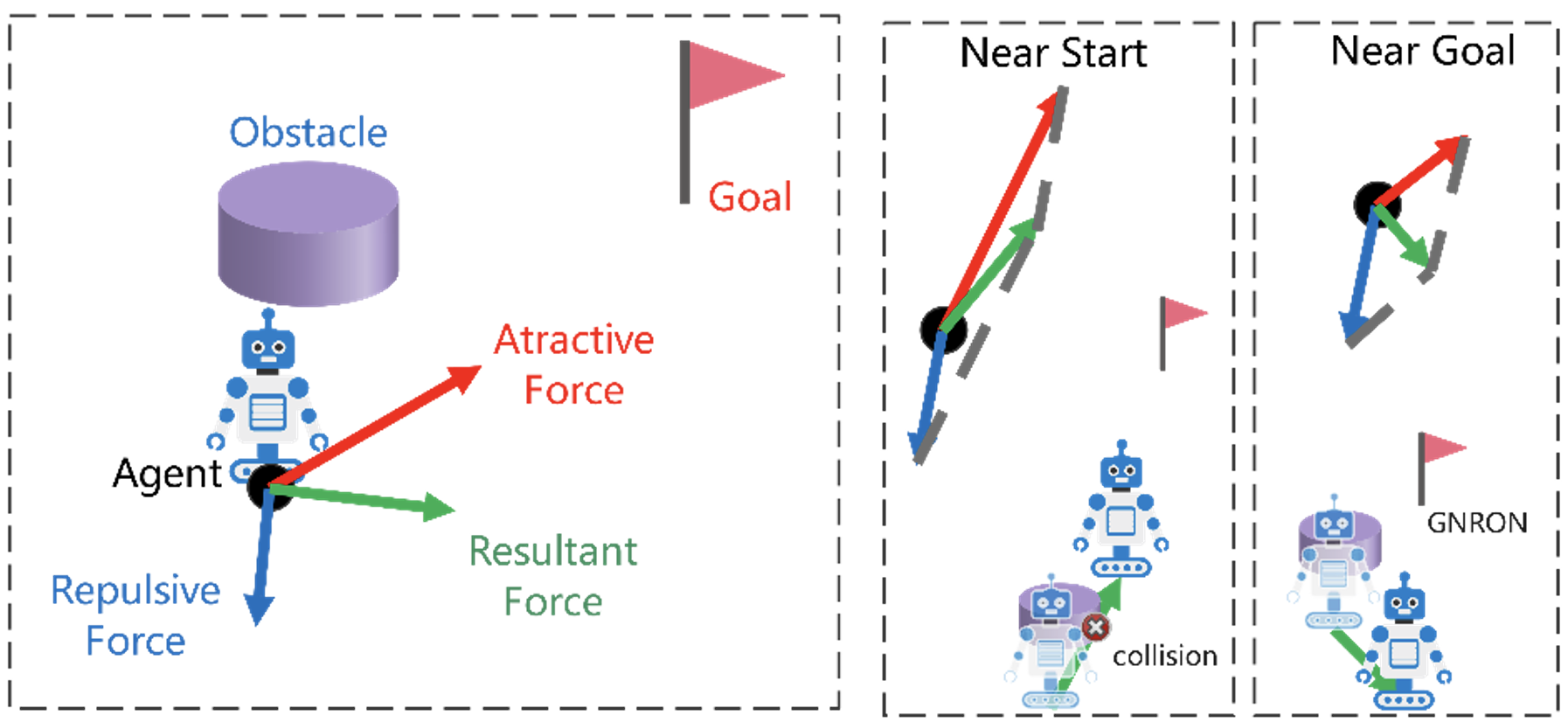
图 1:人工势场法示意图及两种局限性
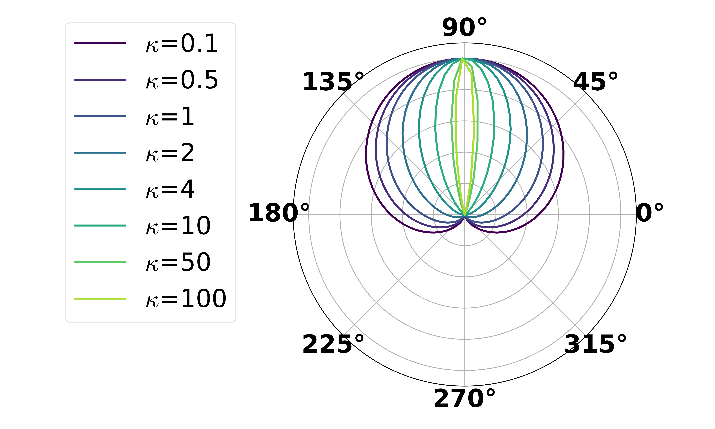
图2:分布式神经元群体编码(方向刺激=90°)
该方法的创新之处在于:利用分布式神经元群体编码方向信息,替代传统单矢量计算方式,实现对吸引力与排斥力的尺度自适应调节;并通过von Mises分布构造感受野宽度,有效缓解了环境尺度变化对路径规划性能的影响。实验在静态与动态场景中对比了NRF与A*、Dijkstra、RRT、APF等多种主流算法的性能,结果表明:NRF作为全局和局部路径规划算法,在不同尺度环境下的规划表现鲁棒性均优于现有方法(平均变异系数CV仅为0.007)。该研究不仅从神经表征理论层面为路径规划提供了新范式,更在智能系统工程落地层面展现出广阔的应用前景,可服务于自主车辆导航、机器人作业控制、智能城市交通管理等关键场景。
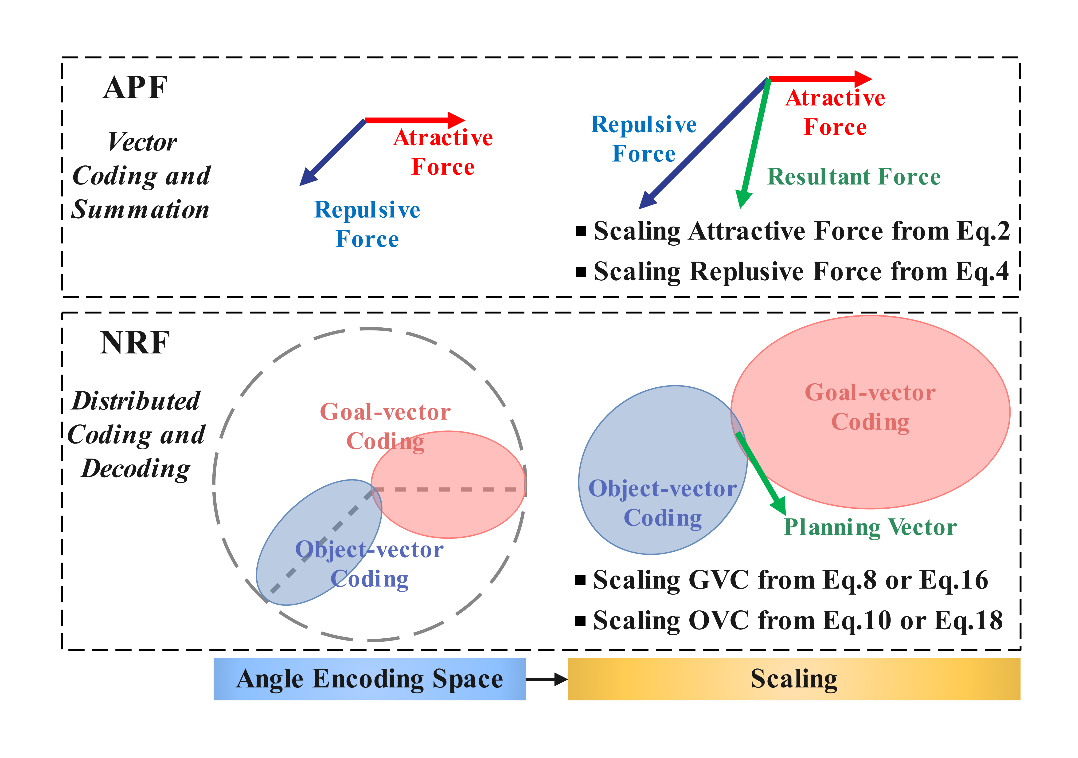
图3:APF和NRF方法对比
近年来,邵宇秀助理研究员与斯白露教授团队聚焦于复杂系统的认知建模与脑启发计算方法,已在Current Biology, Cognitive Neurodynamics等国际期刊发表多篇高水平论文,为人工智能算法的可解释性与生物启发性研究注入持续动能。该研究工作得到了2030 Major Program of China (Grant No. 2022ZD0205005)、the Fundamental Research Funds for the Central Universities (Grant No. 2233100030) 和 the IBRO Early Career Awards的支持。论文链接为:https://ieeexplore.ieee.org/abstract/document/11091598
供稿:邵宇秀
编辑:郝林青
审核:李 辉
邮箱:sss@bnu.edu.cn 邮编:100875 地址:北京市海淀区新街口外大街19号 学院联系电话:(010)58807880
北京师范大学系统科学学院版权所有

院微信公众号

BNU系统学工