自然界中许多生物会自组织涌现出壮观的集群运动。而基于集群机器人控制实现高效且可靠的集群行为是一项具有挑战性的课题。首先,实现多机器人系统分布式控制需要复杂的算法控制、高精度的传感器和足够的驱动。其次,现有的集群模型都基本受到Vicsek模型的影响,强烈地依赖于对齐规则。而对齐规则要求个体需要邻居的方向信息,这提高了对每个个体感知能力的要求。此外,对齐规则的强依赖性会导致群体在宏观上涌现行为的单一性。因此,实现多机器人自组织行为涌现是目前复杂系统控制的一大难题。
2020年7月,由北京师范大学系统科学学院韩战钢教授指导的博士生郑雅婷,与美国西北大学Cristián Huepe教授合作完成一篇探究基于位置控制算法的集群机器人实验的文章(标题为“Experimental capabilities and limitations of a position-based control algorithm for swarm robotics”)发表在期刊《Adaptive Behavior》。该研究基于弹性模型,利用机器人个体之间位置信息实现了多个机器人自组织旋转、一致性运动等群体行为控制。
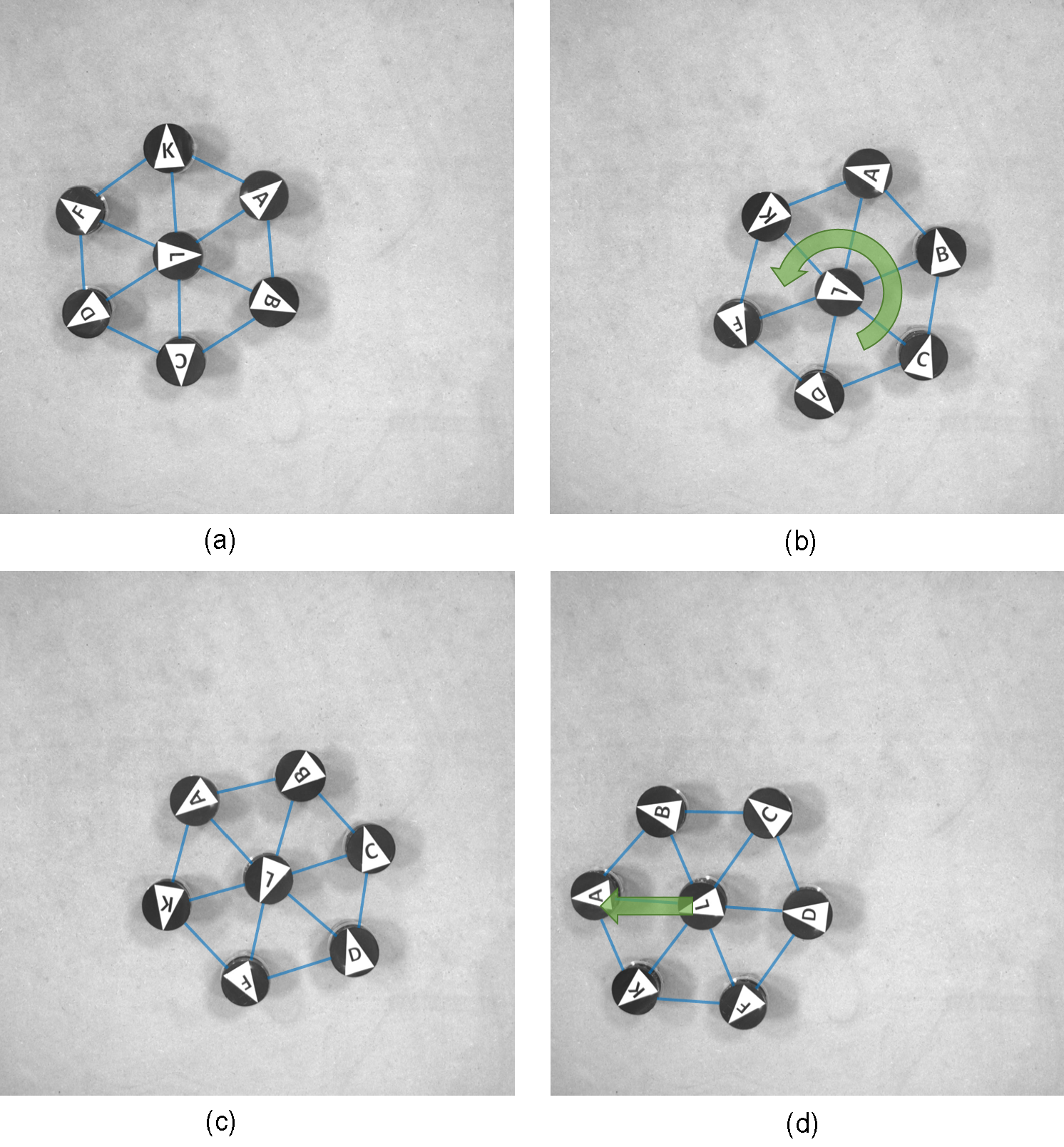
图1机器人集群行为实验。由(a)~(d),分别从随机的速度初始分布状态演化到旋转、一致性运动等实验截图。
这项工作通过AE模型结合集群机器人实验实现了基于位置信息的分布式运动控制算法,通过使用e-Puck机器人群在实际实验中实现了该算法,并展示了其从具有随机方向的状态开始收敛到自组织的集体平移或旋转的能力(如图1所示)。与此同时利用仿真给出群体运动在参数空间上的状态转换图(如图2所示)。这项工作首次分析了群体机器人实验中作为真实世界分散控制算法的AE模型的功能和局限性。通过简单的分析计算还揭示了该算法的一个基本局限性,该算法会产生对齐状态的小幅持续振荡,这与其边际稳定性有关。通过比较预测和测量,我们计算了机器人速度和角速度的实验噪声分布,结果表明它们符合高斯分布(如图3所示)。然后,通过将高斯随机变量与实验测量的标准偏差相加,来实现对该噪声进行建模的仿真。这些仿真是针对多个参数组合执行的,并与实验进行了比较,表明它们为自组织动力学的预期速度和鲁棒性提供了良好的预测。

图2实验和仿真参数空间
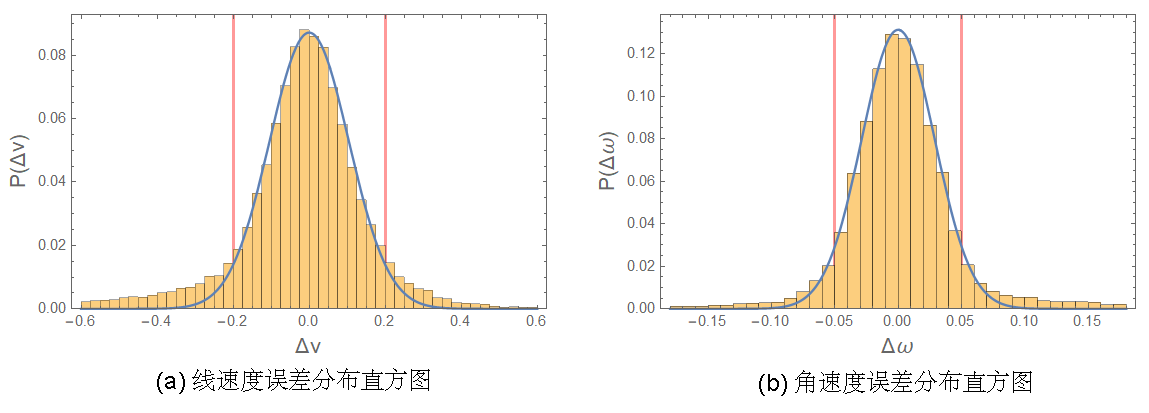
图3角速度误差和线速度误差直方图
该项工作由我院的韩战钢教授作为通讯作者,我院郑雅婷博士为第一作者。该研究小组多年来一直从事集群运动和集群机器人相关课题的研究。郑雅婷博士同时也是比利时布鲁塞尔自由大学Marco Dorigo教授为期两年(2018.9-2020.12)的联合培养博士。文章链接:https://journals.sagepub.com/doi/abs/10.1177/1059712320930418
邮箱:sss@bnu.edu.cn 邮编:100875 地址:北京市海淀区新街口外大街19号 学院联系电话:(010)58807880
北京师范大学系统科学学院版权所有

院微信公众号

BNU系统学工